

Інкрементальний енкодер

Инкрементальный энкодер — это устройство, преобразующее угловое перемещение вала в нормированный дискретный сигнал. Конструктивно энкодер состоит из измерительного преобразователя, защищенного корпусом и вала, передающего вращательное движение. Для защиты от внешних воздействий измерительной части предусмотрены уплотнения корпуса и вала, обеспечивающие защиту от внешних воздействий IP54. Со стороны вала расположен фланец с резьбовыми отверстиями (М3) для крепления энкодера.
 Внешний вид инкрементального энкодера OPKON PRI
Внешний вид инкрементального энкодера OPKON PRI
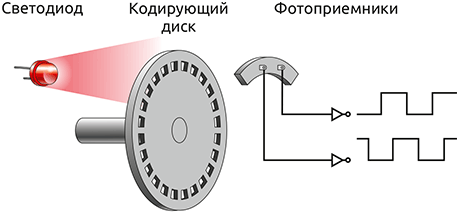
Внутри корпуса располагается фотоприемник (датчик) и взаимодействующий с ним специальный кодирующий диск. В качестве кодирующего диска используется лимб с нанесенными оптическими метками. Во время работы кодирующий диск приводится в движение валом и прерывает световой сигнал.
Таким образом, принцип действия энкодеров OPKON PRI основан на фотоэлектрическом эффекте: при попадании светового потока на фотоприемник, формируется сигнал, соответствующий логической единице, а при его отсутствии — логическому нулю.
Прерывание светового потока осуществляется вращающимся кодирующим диском. Количество прерываний строго постоянно и соответствует количеству меток на кодирующем диске. В характеристиках энкодеров эта величина обозначается как разрешение — количество импульсов, поступающих за один оборот (имп/об, PPR, pulse per revolution). С помощью него можно определить дискретность энкодера — перемещение, соответствующее одному импульсу энкодера.
Например, если использовать энкодеры с разрешением 100, 360 и 5000 имп/об, то один импульс будет соответствовать перемещению на 3.6°, 1°, 0.072° соответственно.
Зная разрешение энкодера и считая количество импульсов (контроллером или счетчиком) можно определить:
- Угол поворота (φ).
Подсчет количества импульсов (n), поступивших от энкодера, позволяет определить угол поворота (φ), совершенный валом. Разрешениеимпобφ = {n cdot 360°} over {Разрешение (имп/об)}Пример: если энкодер выдал 1250 импульсов, а сам он имеет разрешение 5000 имп/об, то это означает, что вал совершил поворот на 90° (1250 * 360 / 5000 = 90).
Разрешениеимпобφ = {n cdot 360°} over {Разрешение (имп/об)}Пример: если энкодер выдал 1250 импульсов, а сам он имеет разрешение 5000 имп/об, то это означает, что вал совершил поворот на 90° (1250 * 360 / 5000 = 90). - Угловую скорость (ω).
Для определения скорости вращения (об/мин) необходимо подсчитывать количество импульсов, поступающих за единицу времени (например, за 1 секунду).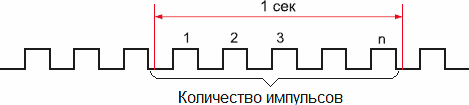 секРазрешениеимпобω = {n cdot 60 сек} over {Разрешение (имп/об)}Пример: если за 1 секунду поступило 1250 импульсов и энкодер также имеет разрешение 5000 имп/об, то скорость вращения вала — 15 оборотов в минуту (1250 * 60 / 5000 = 15).
секРазрешениеимпобω = {n cdot 60 сек} over {Разрешение (имп/об)}Пример: если за 1 секунду поступило 1250 импульсов и энкодер также имеет разрешение 5000 имп/об, то скорость вращения вала — 15 оборотов в минуту (1250 * 60 / 5000 = 15).
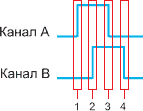
Представленные примеры справедливы для механизмов одностороннего действия. Измерение вращения в двух направлениях невозможно, так как один импульсный сигнал не может дать информацию о том, в какой момент произошла смена направления. Для решения этой проблемы в энкодерах используется два фотоприемника со специальным фильтром (маской), формирующих два сигнала (сигнал А и сигнал В). Данная конструкция позволяет энкодеру выдавать два импульсных сигнала, сдвинутых друг относительно друга на ¼ периода (90°).
Смещение сигналов обеспечивает возможность определения направления в пределах одного импульса. При вращении в прямом направлении сигнал А всегда будет опережать сигнал В, а при вращении в обратном — наоборот, первым будет сигнал В.
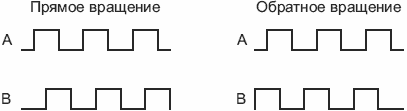 Последовательность импульсов при прямом и обратном вращении
Последовательность импульсов при прямом и обратном вращении
Помимо сигналов А и В в энкодерах дополнительно используется сигнал Z. Он выдает единичный импульс, при прохождении кодирующим диском полного оборота (360°). Сигнал Z позволяет подсчитывать количество оборотов. Таким образом, каждый энкодер оборудован тремя каналами (ABZ) для передачи сигнала.
Разрешение энкодера
Разрешение — это основной параметр энкодера, характеризующий его точность. На первый взгляд может показаться, что лучшим выбором является энкодер с максимальным разрешением. Но они имеют более высокую стоимость и к тому же могут быть не совместимы (по частоте сигнала) с вторичным прибором. Частота сигнала (вторичного прибора) накладывает ограничение на максимальное разрешение и максимальную скорость вращения энкодера.
Например: для ПЛК с максимальной частотой на входе 10 кГц, нужно выбрать энкодер, обеспечивающий дискретность в 1° при максимальной скорости вращения 3000 об/мин.
- Если выбрать энкодер в соответствии с требуемой точностью, то необходима модель 360 имп/об. Но максимальная скорость не должна превышать 1667 об/мин.
- Если выбирать энкодер, соответствующий по скорости вращения, то это модель 200 имп/об. Но при таком разрешении обеспечивается точность 1.8°.
200 имп/об — это номинальное разрешение энкодера, но при использовании специальных алгоритмов счета его можно увеличить в 2 и в 4 раза. Для этого при счете учитываются сигнал не только канала А, но и канала В. При счете по двум каналам, для каждого импульса можно выделить четыре промежуточных состояния:
- Сигнал А = лог. «1», Сигнал В = лог. «0»
- Сигнал А = лог. «1», Сигнал В = лог. «1»
- Сигнал А = лог. «0», Сигнал В = лог. «1»
- Сигнал А = лог. «0», Сигнал В = лог. «0»
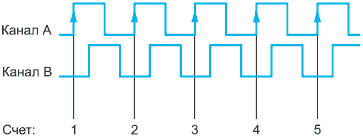
Существует три основных режима счета.
- X1
Счет импульсов производится только по переднему фронту одного сигнала. Количество импульсов, выдаваемых на один оборот соответствует номинальному разрешению энкодера.
Пример: с помощью энкодеров с разрешением 100, 200 и 1000 имп/об возможно отслеживание перемещения с точностью 3.6°, 1.8°, 0.36° соответственно.
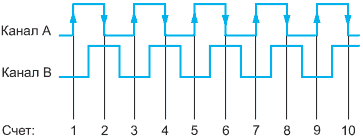
- X2
При счете импульсов учитываются и передний и задний фронты. Таким образом стандартный шаг разбивается пополам, а разрешение увеличивается вдвое.
Пример: с помощью энкодеров с разрешением 100, 200 и 1000 имп/об возможно отслеживание перемещения с точностью 1.8°, 0.9°, 0.18° соответственно.
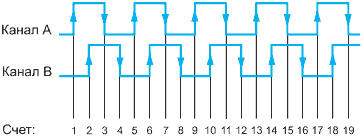
- X4
Для достижения максимальной разрешающей способности счет осуществляется по переднему и заднему фронтам обоих сигналов. Используя такой метод счета разрешение увеличивается в 4 раза.
Пример: с помощью энкодеров с разрешением 100, 200 и 1000 имп/об возможно отслеживание перемещения с точностью 0.9°, 0.45°, 0.09° соответственно.
Типы выходных сигналов
Для передачи сигнала энкодеры могут быть оборудованы тремя типами выходов:
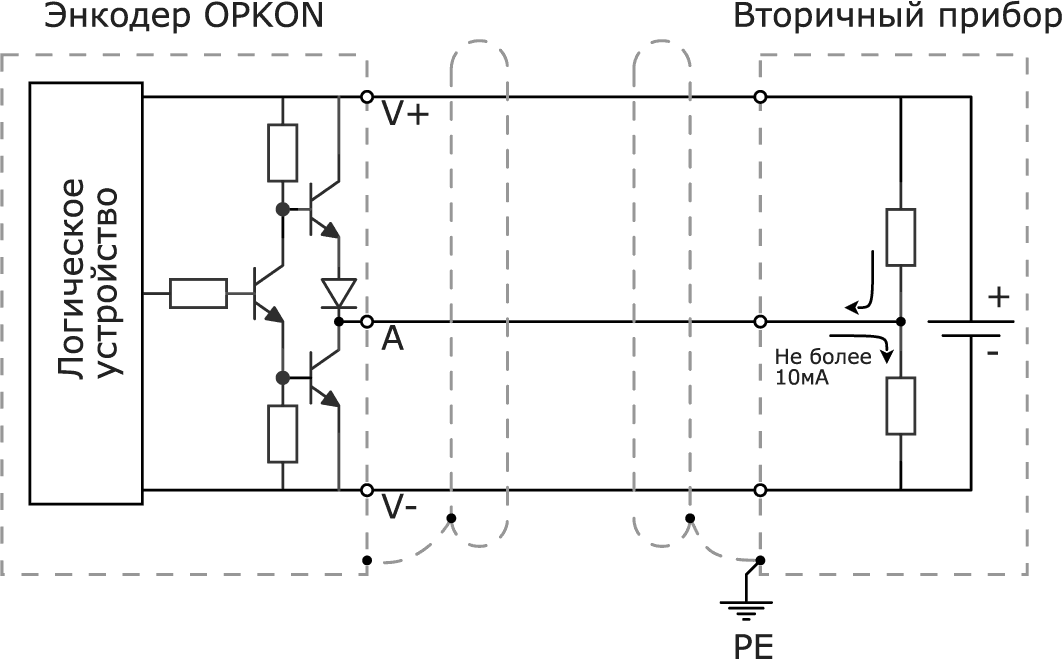
- Транзисторный выход Push-Pull
Для передачи сигнала используется три канала A, B и Z. Каждый из них может быть включен по схеме NPN и PNP.
Уровень сигнала (лог. «1» или «0» ) определяется относительно питающего напряжения. На рисунке справа представлена условная схема подключения.
- Дифференциальный выход LineDriver TTL
Для передачи сигнала используется три пары сигналов AA, BB, ZZ.
Каждая пара передает дифференциальный сигнал. Уровень сигнала — 5 В. Дифференциальная передача необходима при наличии внешних источников ЭМ-помех или при большой длине сигнального кабеля.
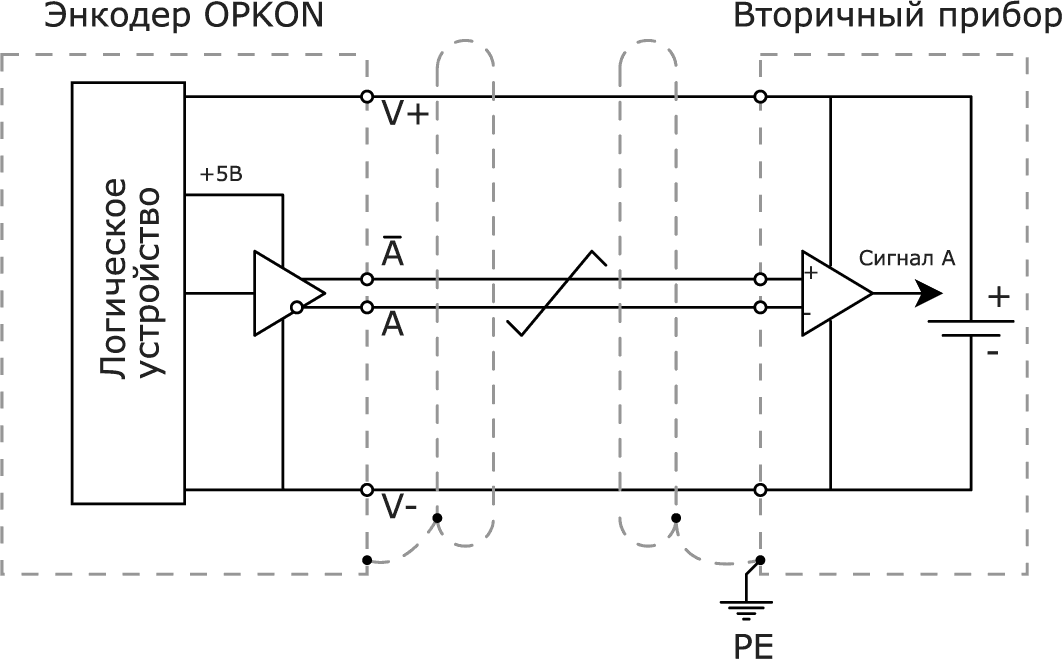
- Дифференциальный выход LineDriver HTL
Данный тип выхода аналогичен модификации LineDriver TTL. Но у модификации HTL уровень сигнала не фиксированный (5 В), а может изменяться в диапазоне от 5 до 24 В. Уровень сигнала соответствует питающему напряжению (см. рисунок справа).
Таким образом, энкодер модификации HTL может выдавать сигнал, соответствующий TTL-логике, для этого достаточно лишь использовать блок питания 5 В. К тому же модификация LineDriver HTL может использоваться, и как обычный энкодер с Push-Pull-выходом.
Благодаря этому модификация LineDriver HTL (HLD) является полностью взаимозаменяемой с LineDriver TTL и Push-Pull.
Универсальные выходы LineDriver
Каждый из выходных сигналов (A, А, B, B, Z, Z) энкодеров OPKON PRI (модификации HTL) является универсальным (реализован по схеме Push-Pull) работает с NPN, и PNP-входами. Это дает возможность использовать энкодеры с выходом LineDriver для передачи сигнала по стандартной дифференциальной схеме и по однопроводной схеме (без инвертированных сигналов).
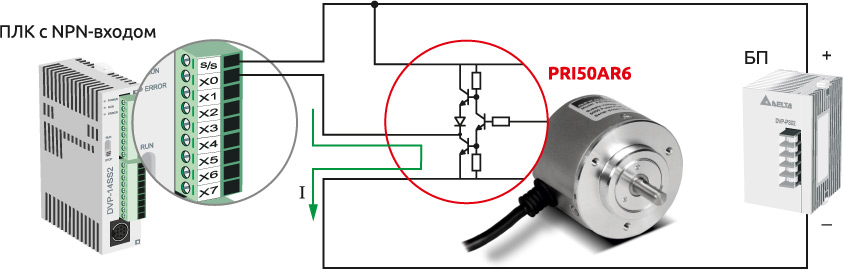 Подключение энкодера PRI 50AR6 HLD 1000 Z V3 2M5R SL-TS к контроллеру с NPN-входами
Подключение энкодера PRI 50AR6 HLD 1000 Z V3 2M5R SL-TS к контроллеру с NPN-входами
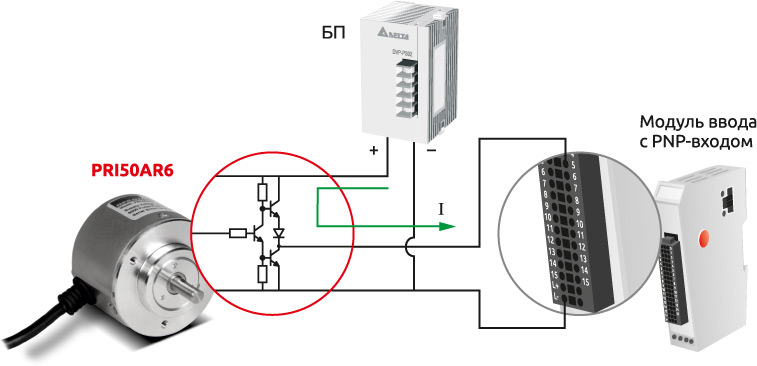 Подключение энкодера PRI 50AR6 HLD 1024 Z V3 2M5R SL-TS к оборудованию с PNP-входами
Подключение энкодера PRI 50AR6 HLD 1024 Z V3 2M5R SL-TS к оборудованию с PNP-входами
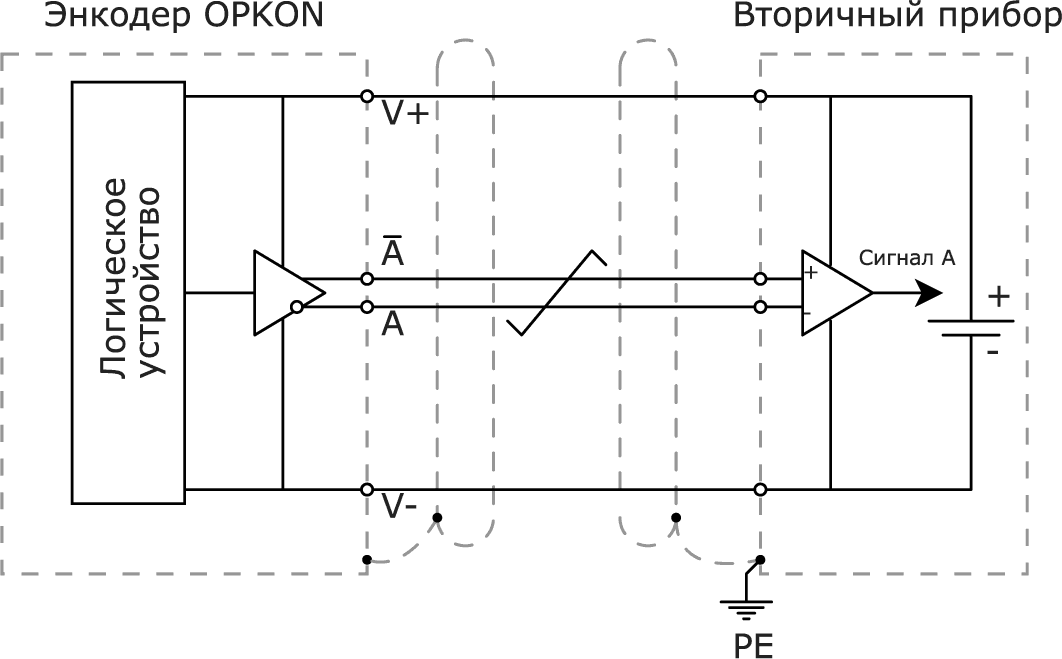
Помехозащищенность дифференциального выходного сигнала
При использовании энкодеров со стандартным выходом (ABZ) возможно возникновение ложных срабатываний. Это может происходить из-за большой длины сигнального кабеля, стороннего оборудования (излучение ЭМ-помех) или при несоблюдение правил монтажа. Для работы в таких условиях рекомендуется использовать энкодеры с дифференциальным выходом (A, A,B, B, Z, Z).
Помехозащищенность дифференциального сигнала выше, т.к. вторичное устройство (счетчик) отслеживает разницу между двумя сигналами (A и A), а не между одиночным сигналом и уровнем питающего напряжения (А и Vобщ.). Таким образом, помехи одинаково влияющие на два проводника (A и A) при дальнейшей обработке сигнала (дифференциальным усилителем вторичного устройства) фильтруются и не вносят ошибок в измерения.
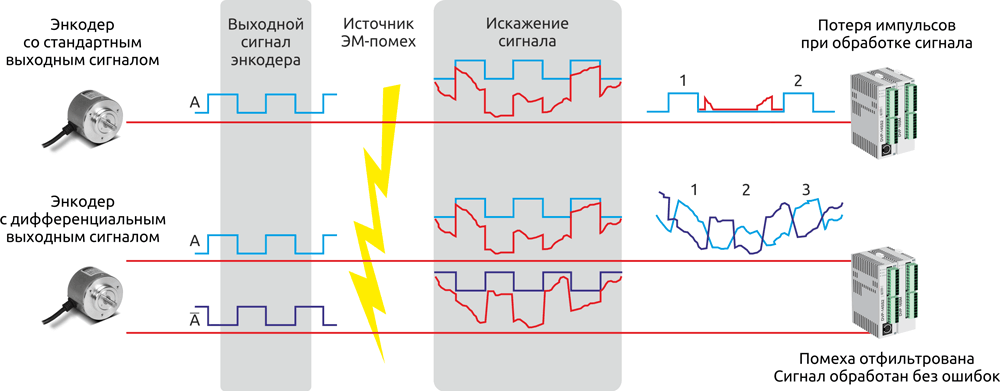 Отличия работы энкодеров со стандартным и дифференциальным выходными сигналами
Отличия работы энкодеров со стандартным и дифференциальным выходными сигналами
 Перезапуск сімейства перетворювачів тиску VegabarVega Grieshaber повністю оновила свій портфель датчиків тиску. Серія 80 була скорочена до трьох преобразователей технологічного тиску, які охоплюють усі сценарії.Повна версія статті
Перезапуск сімейства перетворювачів тиску VegabarVega Grieshaber повністю оновила свій портфель датчиків тиску. Серія 80 була скорочена до трьох преобразователей технологічного тиску, які охоплюють усі сценарії.Повна версія статті Типи передавачів вимірювання рівня та як вони працюють?Як випливає з назви, передавач вимірювання рівня – це прилад, що забезпечує безперервне вимірювання рівня. Його можна використовувати для визначення рівня рідини або сипучої речовини в певний час. Рівні таких середовищ, як вода, в’язкі рідини та паливо, або сухих середовищ, таких як сипучі речовини та порошки, можна виміряти за допомогою передавача.Повна версія статті
Типи передавачів вимірювання рівня та як вони працюють?Як випливає з назви, передавач вимірювання рівня – це прилад, що забезпечує безперервне вимірювання рівня. Його можна використовувати для визначення рівня рідини або сипучої речовини в певний час. Рівні таких середовищ, як вода, в’язкі рідини та паливо, або сухих середовищ, таких як сипучі речовини та порошки, можна виміряти за допомогою передавача.Повна версія статті